Drohnen Punktwolke – UAV Befliegung zur Gewinnung von Rohdaten
Vor der Erstellung einer Drohnen Punktwolke wird die Befliegung eines Objekts, Flusses, Feldes, einer Baustelle, oder sonstigen Flächen wird vorab gründlich im Büro mit den Piloten via Google Earth geplant. Machbarkeit wird geprüft und es werden alle nötigen Genehmigungen eingeholt. Oft reicht unsere flächendeckende und bereits vorhandene allgemeine Aufstiegserlaubnis. In speziellen Fällen benötigen wir eine Sondergenehmigung (Einzelaufstiegserlaubnis), z.B. beim Drohnen Flug in der Stadt, an Autobahnen, Bundesstraßen, Bahnstrecken etc.. Unsere geschulten und über Europa verteilten Piloten reisen dann zum Einsatzort und führen die UAV Befliegung durch. Aus den Luftbildern / UAV-Aufnahmen aus unterschiedlichen Winkeln werden später die Daten für die 3D Punktwolke (Point Cloud) gewonnen. Wir nutzen ausschließlich kalibrierte, digitale high end Fotokameras für unsere Projekte, um die höchste Auflösung und Detailtreue zu erhalten. Dank dieser hochaufgelösten Kameras schaffen wir es, bis zu 150 ha kostengünstig mittels Drohne an einem Tag zu erfassen. Nach der Befliegung mit der Drohne werden die Rohbilder vor Ort überprüft und für die Weiterverarbeitung gesichert.
Drohnen Punktwolke – UAV 3D Punktwolke aus den Fotos Berechnen (Point Cloud Processing)
Photogrammetrie ist eine etablierte Methode, um aus Luftbildern eine Punktwolke zu generieren. Sobald die Bilddaten eines texturierten Objektes aus unterschiedlichen Perspektiven vorliegen, kann an einem Hochleistungscomputer mittels Bildzuordnungs- und Triangulationsverfahren eine Punktwolke prozessiert werden. Wir erstellen die Punktwolken je nach Projekt mit Agisoft Photoscan, RealityCapture und in Einzelfällen auch PIX4D (PIX4Dmapper, PIX4Dbim). Durch die scharfen,hochaufgelösten UAV Bilder und der hohen Anzahl an Megapixeln erhalten wir eine sehr hoher Punktdichte und eine Punktgenauigkeit im Zentimeterbereich.
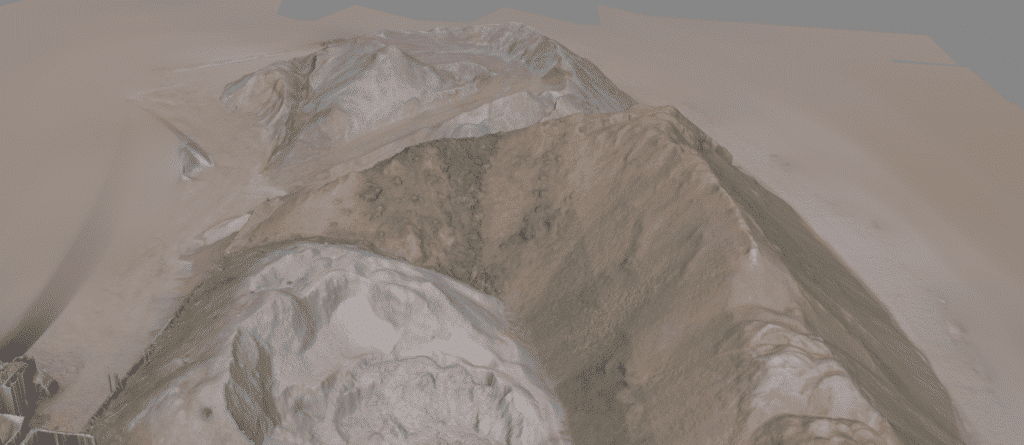
Drohnen Punktwolke – Prozessierung Mesh, Textured Mesh (3D Modell) aus UAV Punktwolke
Um die 3D Vermaschung (3D Mesh) einer Pointcloud zu erstellen, nutzen wir das Verfahren der Triangulierung. In diesem Verfahren werden geometrische Flächen in ein Netz aus Dreiecken eingeteilt. Die Dreiecke werden oft auch als Polygone oder Faces bezeichnet. Mit Hilfe des Verfahrens können zuvor mittels UAV Befliegung erstellte Punktwolken zu 3D Modellen weiterverarbeitet werden. Das erstes Ergebnis ist eine farblose, geschlossen Fläche, die man als 3D Mesh bezeichnet. Prozessierung eines farbiges Meshes erfolgt über das erstellen einer originalgetreuen Textur. Durch die “Einfärbung” der Dreiecke wird aus dem einfachen 3D Mesh ein Textured 3D Mesh bzw. ein texturiertes 3D Modell. Wir können somit jedes aus nahezu jedem Objekt oder jeder Oberfläche ein realistisches und realitätsnahes 3D Modell erstellen.
Wichtig zu wissen: Wir können unter anderem folgende Datensätze direkt aus der Punktwolke generieren: Datensätze für GIS Anwendungen wie digitale Geländemodelle (DOM – digitales Oberflächenmodell oder DGM – digitales Geländemodell), georeferenzierte Orthophotos aber auch 3D Modelle (z.B. als .obj Object File) sowie Daten für den Einsatz in BIM Software (Building Information Modeling).
Drohnen Punktwolke – Export als .las, .laz, .xyz File zur Weiterverarbeitung und Auswertung
Wir können Ihnen die die 3D Punktwolke in folgenden Formaten zur Weiterverarbeitung und Auswertung übergeben:
- Wavefront OBJ
- Stanford PLY
- XYZ text file format
- ASPRS LAS
- LAZ
- ASTM E57
- U3D
- Potree
- Agisoft OC3
- Topcon CL3
Die generierten 3D Punktwolken lassen sich somit direkt in verschiedenen Programmen wie z.B. Autodesk Revit, PointCab, Cloud Compare (kostenloser Point Cloud Viewer) und einigen anderen nutzen. Um die Daten der Punktwolke z.B. in Graphisoft Archicad zu nutzen, muss man über eine Punktwolken-Software gehen, um die Daten nutzbar zu machen.